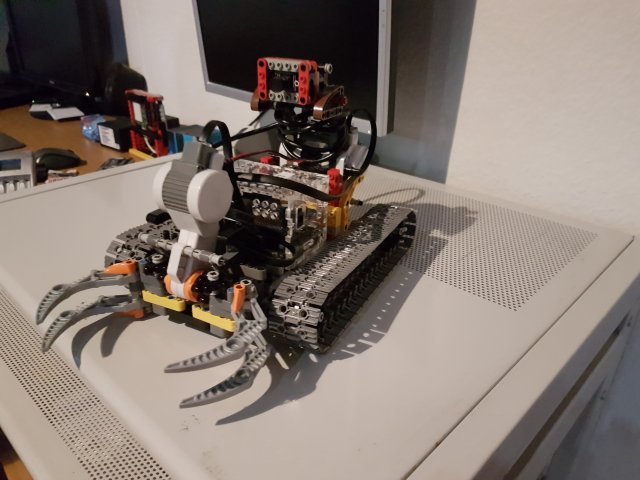
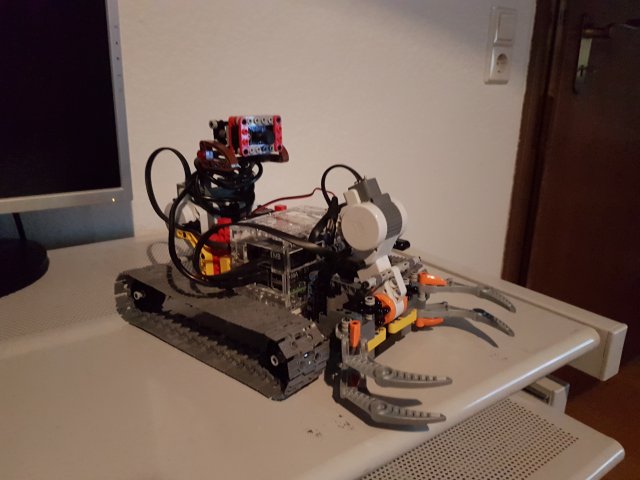
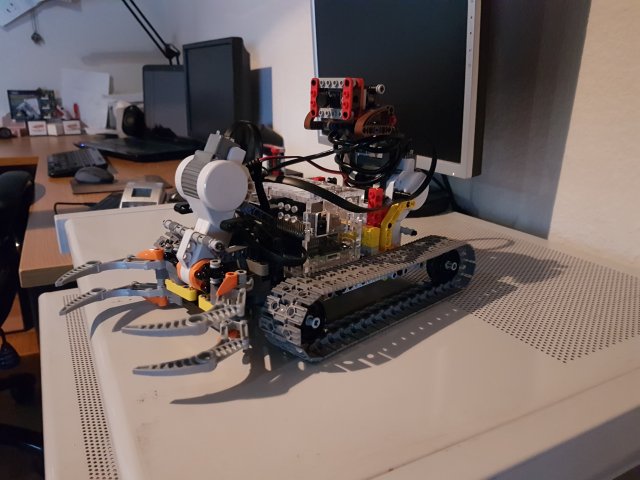
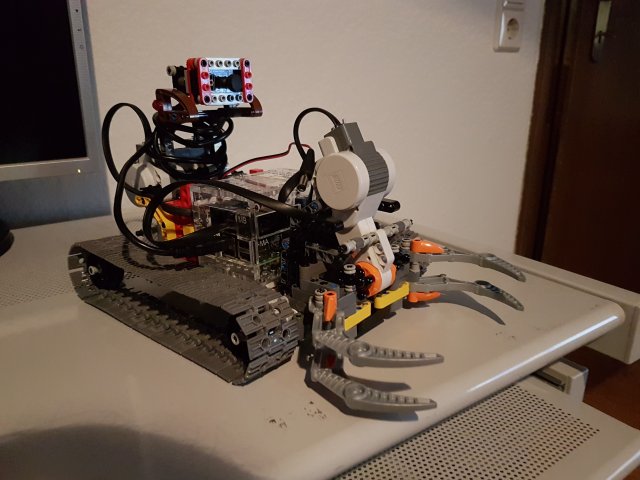
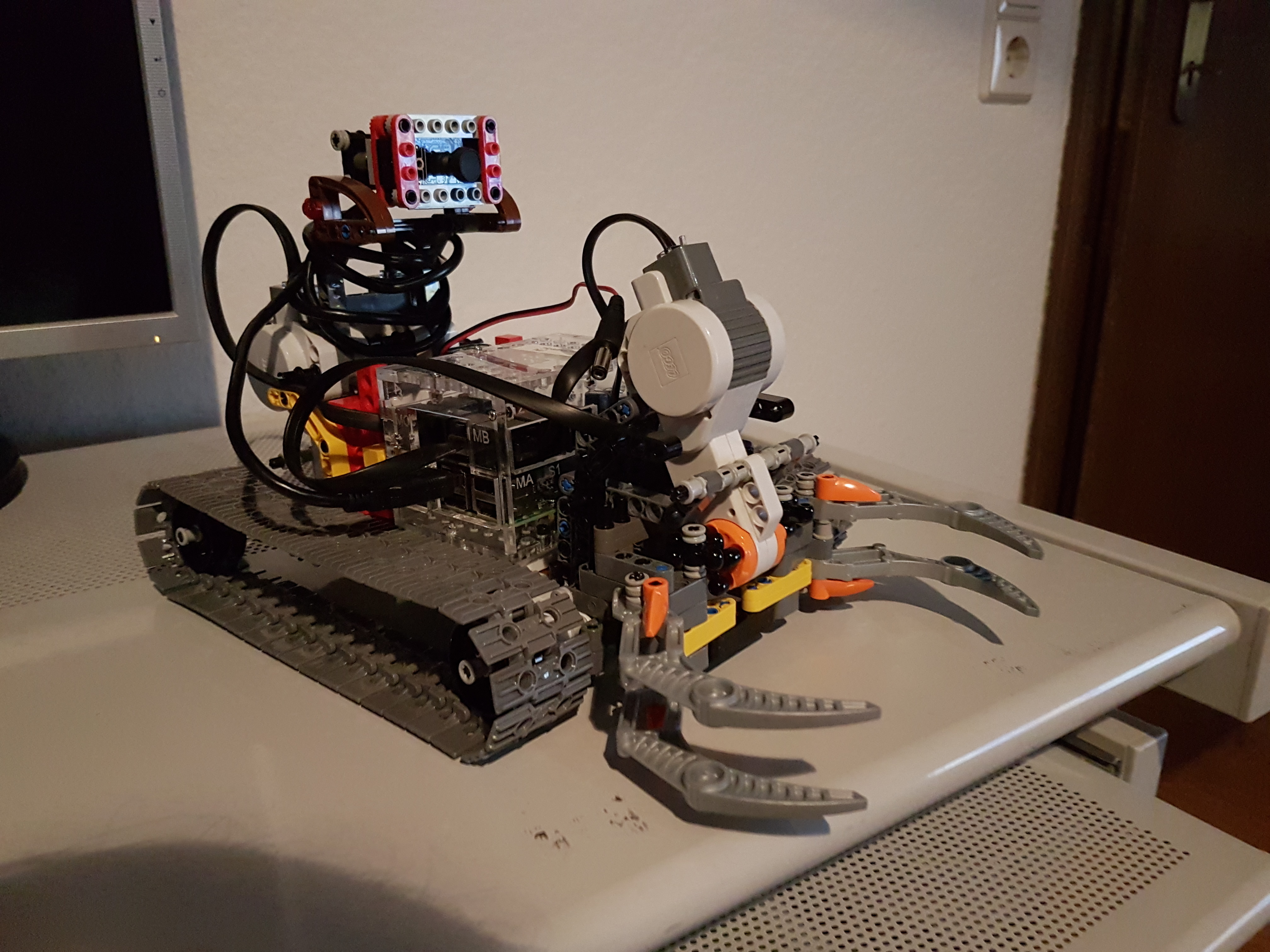
 Run robor, RUN! Naaa. Ein einfacher Roboter. Sein Aufbau verrät auch all sein können. Ein fahrbarer Roboter der an der Front über ein kleinen Greifer verfügt. Somit können Sachen durch die Gegend geschoben werden. Als Herzstück dient wieder ein RaspberryPi 3 mit der Dexter-Industrie Platine BrickPi. Zur Steuerung wird eine Website angeboten. Die Steuerung kann somit über ein Notebook/PC mit den Tasten WSAD nach Ego-Shooter manier erfolgen, als auch mit den Smartphone, dann durch bereitsgestellte Buttons.
Run robor, RUN! Naaa. Ein einfacher Roboter. Sein Aufbau verrät auch all sein können. Ein fahrbarer Roboter der an der Front über ein kleinen Greifer verfügt. Somit können Sachen durch die Gegend geschoben werden. Als Herzstück dient wieder ein RaspberryPi 3 mit der Dexter-Industrie Platine BrickPi. Zur Steuerung wird eine Website angeboten. Die Steuerung kann somit über ein Notebook/PC mit den Tasten WSAD nach Ego-Shooter manier erfolgen, als auch mit den Smartphone, dann durch bereitsgestellte Buttons.
Der Roboter ist aus Lego-Mindstorm Teilen sowie herkömmlichen Lego-Bausteinen zusammengesetzt. Als Programmierbasis diente Java im Zusammenspiel mit dem Spring-Framework und der Java-BrickPi Bibiothek. Für eine möglichst nahe Echtzeit Steuerung werden die Befehle über einen Web-Socket Verbindung gesendet. Die Kamera erlaubt es, gemütlich auf der Couch liegen zu bleiben, während man mit dem Roboter die Welt erkundet.
Viel mehr gibt es auch dazu gar nicht zu sagen. Ein paar Bilder sind im unteren Bereich zu sehen. Toll was ;-)